









Russian Federation
Russian Federation
Russian Federation
from 01.01.2015 to 01.01.2019
Moscow State University of Civil Engineering (Department of technology and organization of construction production, Bachelor student 4th course)
Russian Federation
VAK Russia 05.17.00
VAK Russia 05.23.00
UDC 62
CSCSTI 55.51
Russian Trade and Bibliographic Classification 542
The basics of the automated selection of mobile construction cranes on the parametric conformity of the mounted structures are outlined. The tasks of crane selection are solved based on the software package created: the position of the axes of movement and the position of the crane stops during the installation of one-storey industrial buildings is determined. The organization and technology of using mobile cranes on a pneumatic move is considered. Special attention is paid to cranes on the chassis of various types of cars of domestic and foreign production. The zones of admissible parking of cranes during installation and cargo handling operations are studied. The recommendations for determining the maximum and minimum allowable hook lifting using the above algorithms are given. The composition of the software package, service programs, a crane selection subroutine, a subroutine for checking the possibility of lifting a crane with a given arrow and modification, a subroutine for determining the crane parking area, service programs, a program for creating and maintaining libraries of crane characteristics are given. The article describes the algorithms and developed computer programs. The results of the calculations described in the work can be used at the stage of development the POS, PPR and in the analysis of new technological solutions. The recommendations and proposals are intended for research, design and construction organizations.
mobile crane’s selection, technical characteristics, programs for calculating parameters, selection algorithm, software selection package
Введение. В связи с тем, что строительно-монтажные работы с использованием самоходных кранов в отечественном строительстве ведутся в различных природно-климатических условиях нашей страны целесообразно методику выбора кранов выполнять не только с учетом грузоподъемности, дальности подачи и высоты отметок установки и монтажа конструкций. В этом случае целесообразно с учетом методики учитывать природно-климатические условия на объекте производства работ (грунтовые условия, тип основания грунта), положительные и отрицательные температуры наружного воздуха, скорость ветра и другие факторы влияния на целесообразность использования той или иной модификации самоходного стрелового крана [1-5].
Методика выбора на основе автоматизированных систем самоходных строительно-монтажных кранов в настоящее время осуществляется, в общем и целом, по созданным программным комплексам. Подбор машин в отечественном строительстве для применения в конкретных условиях строительной площадки с учетом природно-климатических факторов влияния и технических характеристик грузоподъемных монтажных кранов выполняется на этапе организационно-технического проектирования. Результаты выбора предназначаются для использования на стадии разработки проекта организации строительства (ПОС) и проекта производства работ (ППР) [1-5].
Алгоритмы выбора кранов имеют свои специфические особенности, приведенные в данной работе с учетом последующей работы самоходных кранов различной модификации. Число модификаций самоходных строительно-монтажных кранов с данной стрелой, как отечественных так и зарубежных, равно числу возможных высот установки этой стрелы. В системе их классификации принять также, что они имеют модификации соответствующие каждой стреле.
При работе алгоритма возможны два случая. Грузы с заданными параметрами (вес, полуширина‚ высота строповочного приспособления) необходимо поднять на заданную высоту. При этом производится перебор стрел и модификаций крана. При нахождении стрелы и модификации‚ обеспечивающих подъем всех грузов, работа алгоритма заканчивается. Грузы необходимо подать на ранее смонтированные конструкции и установить на заданной высоте. Отметка установки и высота смонтированных конструкций известны. В этом случае также производится перебор стрел и модификаций рассматриваемого крана. Проверка возможности монтажа набора грузов каждой модификацией данного крана производится в следующем порядке.
Для каждого груза сначала определяют интервал вылетов, на котором кран может осуществить подачу его за смонтированные конструкции. Для этого проверяют возможность подъема некоторого фиктивного груза, имеющего нулевые вес и высоту строповочного приспособления, полуширину, равную дальности подачи, и высоту подъема, равную высоте смонтированных конструкций. При проверке определяют интервал вылетов, в котором возможен подъем и установка (монтаж). Затем возможность подъема действительного груза проверяют в этом интервале вылетов. Следует отметить, что часто несколько грузов монтируют с одинаковой подачей и при одинаковой высоте смонтированных конструкций. Такие грузы целесообразно группировать и рассматривать один фиктивный груз для группы действительных [1-6].
Работа алгоритма заканчивается либо после нахождения выбора стрелы и модификации крана, достаточного для монтажа всего набора грузов, либо после окончания перебора стрел и модификаций.
Алгоритм подбора крана. Алгоритм предназначен для выбора крана из имеющегося набора, способного смонтировать данный комплект грузов. Для этого крана определяется также необходимая стрела и модификация.
Задача решается путем перебора кранов набора. При этом необходимо учесть, что:
часто встречаются задачи, в которых необходимо подобрать кран какого-либо определенного типа (например, башенный), в связи с чем каждому крану целесообразно присвоить признак принадлежности к тому или иному типу; из всех кранов, способных смонтировать данный набор грузов, следует выбрать тот, который по каким-либо причинам наиболее предпочтителен, для чего каждому крану присваивается приоритет - натуральное число, характеризующее относительную степень предпочтительности данного крана, а выбирается тот, у которого значение приоритета меньше.
Алгоритм определения зоны стоянки крана. Определение допустимой зоны стоянки крана для монтажа элементов при наличии, помехи в подстреловом пространстве является важной задачей в области подбора строительно-монтажных кранов и оптимизации процессов монтажа. Поэтому для решения этой задачи целесообразна разработка специального алгоритма. Базой для данного алгоритма служат описанные выше методы параметрического выбора кранов. Зона стоянки крана заданной модификации определяется с учетом необходимости заноса груза за ранее смонтированные конструкции высотой
Зона стоянки может быть представлена в виде многоугольника (рис. 1), симметричного относительно горизонтальной оси.
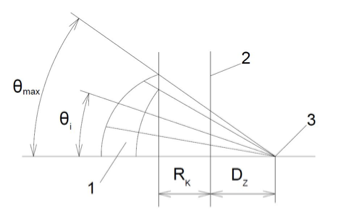
Рис. 1. Зона допустимых стоянок крана при выполнении монтажных работ: 1 – зона стоянки крана; 2 – ранее смонтированные конструкции; 3 – центр тяжести монтируемого груза;
Определение максимально и минимально допустимых вылетов крюка для каждого угла
Состав программного комплекса. Комплекс состоит из подпрограмм параметрического выбора кранов и программы ведения каталогов (библиотек) характеристик кранов.
Имеются следующие программы параметрического выбора: сервисные подпрограммы – обеспечивают ввод и вывод информации о кранах, корректировку этой информации в памяти и т.д., освобождают пользователя от необходимости знать внутренние структуры данных комплекса.
Ряд служебных программ:
- подпрограмма подбора крана, способного смонтировать заданный набор грузов;
- подпрограмма проверки возможности монтажа набора грузов заданным краном;
- подпрограмма проверки возможности подъема заданным краном с заданной стрелой и модификации заданного груза;
- подпрограмма определения допустимой зоны стоянки крана.
Сервисные программы. Создание набора кранов. Подпрограмма осуществляет ввод в память ЭВМ необходимой для расчетов исходной информации по строительно-монтажным кранам.
Входными параметрами подпрограммы являются номер вводного устройства и количество кранов в наборе.
Подготовка исходной информации осуществляется автоматизировано с помощью программы ведения библиотек характеристик кранов. Подпрограмма присваивает вводимым кранам приоритеты, равные их порядковым номерам в наборе.
Печать оглавления набора кранов. Подпрограмма распечатывает в табличной форме информацию о кранах: порядковый номер в наборе, марку, приоритет, максимальную грузоподъемность, длины стрел и гуськов и т.д.
Входными параметрами подпрограммы являются номера кранов, информацию о которых необходимо распечатать.
Присвоение приоритета крану. Подпрограмма позволяет изменять приоритет кранов в созданном наборе. Входными параметрами являются номер крана и новое значение его приоритета.
Выдача информации по крану. Подпрограмма обеспечивает получение подробной информации о кранах набора.
Входными параметрами являются номера кранов, его стрелы и модификации; выходными - марка крана, приоритет, признак принадлежности к тому или иному типу (пневмоколесный, башенный и т.п.), максимальная грузоподъемность, длина стрелы и гуська и др.
Выдача числа стрел. Подпрограмма дает возможность узнать количество стрел указанного крана набора. Входным параметром является номер крана в наборе, выходным - число его стрел.
Выдача числа модификаций. Подпрограмма дает возможность узнать количество модификаций заданной стрелы указанного крана.
Входными параметрами являются номер крана, стрелы, выходными - число модификаций.
Подпрограмма подбора крана. Подпрограмма обеспечивает выбор крана, способного смонтировать заданный набор грузов, определение номера необходимой стрелы и модификации.
Входными параметрами являются параметры набора грузов: количество грузов, их масса, полуширина, высота строповочного приспособления, требуемая высота подъема. При необходимости может быть задана также величина отметки монтажа грузов на ранее смонтированные конструкции и высота этих конструкций, а также требуемый тип крана [11-13].
Выходными параметрами являются номера крана, его стрелы и модификации.
Если для монтажа можно использовать несколько различных кранов, то подпрограмма выбирает тот из них, который имеет самое меньшее значение приоритета.
Подпрограмма проверки возможности монтажа набора грузов заданным краном. Подпрограмма позволяет, проверить возможность монтажа набора груза заданным краном и, если монтаж возможен, определить номер необходимой стрелы и модификации.
Входными параметрами являются перечисленные выше характеристики набора, грузов и номер рассматриваемого крана.
Выходными параметрами являются номера необходимой стрелы и модификации.
Подпрограмма проверки возможности подъема груза краном с заданной стрелой и модификацией. Подпрограмма осуществляет проверку возможности подъема единичного груза заданным краном с заданной стрелой модификацией в указанных пределах изменения вылета крюка. При необходимости определяется также интервал вылетов крюка, в котором возможен подъем.
Входными параметрами являются характеристики рассматриваемого груза и номера крана, стрелы и модификации.
Выходными параметрами являются границы интервала допустимых для подъема груза вылетов крюка или информация о возможности подъема.
Подпрограмма определения зоны стоянки крана. Подпрограмма позволяет определить границы зоны допустимых стоянок заданного крана с заданной стрелой и модификацией при монтаже единичного груза.
Входными параметрами являются характеристики монтируемого груза, дальность его заноса за ранее смонтированные конструкции, высота этих конструкций, а также номер крана, стрелы и модификации [11-13].
Выходными параметрами являются координаты границы зоны допустимых стоянок крана (см. рис. 1).
Служебные подпрограммы. В состав комплекса входят три служебных подпрограммы, осуществляющие вычисление грузоподъемности крана и высоты подъем груза на заданном вылете и решение уравнений методом половинного деления интервала.
Программа создания и ведения библиотек характеристик кранов. Подпрограммы параметрического выбора требуют достаточно подробного описания характеристик строительно-монтажных кранов. Очевидно, что подобная информация должна вводиться в ЭВМ однократно, постоянно храниться на машинных носителях и использоваться по мере необходимости.
Программа создания и ведения библиотек характеристик кранов обеспечивает выполнение всех операций по работе с информацией о кранах, записанной на магнитных дисках. Использование этой программы обеспечивает легкий и удобный доступ к информации о кранах, ее корректировку, дополнение, замену, позволяет автоматизировать подготовку данных для подпрограмм, параметрического выбора [11-15].
Программа позволяет выполнять следующие операции:
- Создание библиотек характеристик кранов. При этом указывается размер библиотеки, максимальное число кранов в ней, имя библиотеки.
- Обработка характеристик кранов и включение их в библиотеку. Осуществляется контроль корректности вводимой информации, аппроксимация грузовых характеристик, включение информации в библиотеку. Результаты расчетов выводятся на печать.
- Удаление характеристик определенных кранов из библиотеки.
- Распечатка на терминале состояния библиотеки (имя библиотеки, ее размер, число кранов в библиотеке, наличие свободного места и др.).
- Распечатка оглавления библиотеки. На терминал или печатающее устройство выдаются сведения о том, характеристики каких кранов есть в библиотеке.
- Краткая распечатка информации о кранах. На терминал или печатающее устройство выдаются краткие характеристики указанных (или всех имеющихся в библиотеке) кранов: марки длины стрел и гуськов, максимальная грузоподъемность и др.
- Выдача полной информации об указанных кранах. Информация выдается в форме, которую можно непосредственно (без промежуточной обработки) использовать при работе подпрограмм параметрического выбора кранов.
- Включение информации, выданной программой, в библиотеку. Наличие этой возможности обеспечивает перепись данных из одной библиотеки в другую, корректировку данных.
- Упорядочение имеющихся в библиотеке данных по заданному признаку. Это позволяет выдавать имеющуюся в библиотеке информации в определенном порядке, например, в порядке возрастания грузоподъемности кранов.
- Выдача на терминал списка команд, принимаемых программой.
Вывод. Методологические основы и программные комплексы, описанные в данной статье, позволяют автоматизировать процесс выбора самоходных кранов, что, в свою очередь, позволяет повысить производительность выполнения строительно-монтажных работ, сократить сроки создания проектной документации. Результаты, полученные в данной статье, помогут проектным организациям и производителям работ выполнять их с высоким качеством, безопасно и в установленные сроки.
1. Oleynik P.P., Brodskiy V.I., Kuzmina T.K. Organizacionnie formy mobilnogo stroitelstva [Organizational forms of mobile construction]. M.: Publishing House ASV. 2015, 84 p. (rus)
2. Oleynik P.P., Zhadanovskiy B.V., Sinenko S.A. Vozvedenie monolitnih zdaniy i sooruzheniy [The construction of monolithic structures of buildings and structures]. M .: Publishing House of National Research University MGSU. 2018, 493 p. (rus)
3. Kopylov V.D. Ustroistvo monolitnih betonnih konstrukciy pri otricatelnoy temperature [The installation of monolithic concrete structures at low temperatures]. M.: Publishing House ASV. 2014, 184 p. (rus)
4. Ershov M.N., Lapidus A.A., Telichenko V.I. Technologicheskie processi v stroitelstve. [Technological processes in construction]. M.: Publishing House ASV. 2016, 1072 p. (rus)
5. Oleynik P.P. Organizatsia, planirovanie i upravlenie v stoitelstve. [Organization, planning and management in construction]. M.: Publishing House ASV. 2016, 125 p. (rus)
6. Weinstein M.S., Zhadanovskiy B.V., Sinenko S.A., Afanasyev A.A. The choice of means of mechanization of the production of construction and installation works [Vibor sredstv mehanizacii proizvodstva stroitelno-montajnih rabot]. Scientific Review. 2015. No. 13. Pp. 123-127. (rus)
7. Oleynik P.P., Brodskiy V.I. Organization of work on the dismantling of buildings and structures [Organizaciya rabot po demontaju zdanii i soorujenii]. Mechanization of construction. 2016. No. 2. Pp. 28-32. (rus)
8. Shirshikov B.F., Brodskiy V.I. Organizacionno-tehnologicheskie resheniya po bezopasnosti truda v proektah proizvodstva rabot [Organizational and technological solutions for occupational safety in work projects]. M.: Publishing House ASV. 2015, 100 p. (rus)
9. Ghazaryan R.R., Lyovin B.A. Osnovi organizacii planirovaniya i upravleniya avtomobilnimi dorogami [Fundamentals of the organization of planning and management of roads]. M.: Russian University of Transport (MIIT). 2018, 255 p. (rus)
10. Oleynik P.P., Brodskiy V.I. Organizaciya stroitelnogo proizvodstva. Podgotovka i proizvodstvo stroitelno-montajnih rabot [The organization of construction production. Preparation and production of construction and installation works]. M.: Publishing House MGSU. 2014, 96 p. (rus)
11. Zhadanovskiy Boris, Sinenko Sergey. The methodic of calculation for the need of basic construction machines on construction site when developing organizational and technological documents. E3S Web of Conferences. High-Rise Construction 2017, HRC 2017. 2018. Pp. 03077.
12. Oleynik P.P., Sinenko S.A., Zhadanovskiy B.V., Brodskiy V.I., Kuzhin Marat. Construction of a complex object. Matec Web of Conferences. 5th International Scientific Conference "Integration, Partnership and Innovation in Construction Science and Education", IPICSE 2016. 2016. Pp. 04059.
13. Oleynik P.P., Brodskiy V.I., Grigorieva L.S. Determining the degree of mobility of building systems. Applied mechanics and materials. 2014. Pp. 2253-2256.
14. Oleynik P., Kuzmina T. Modelling the reduction of project making duration. Matec Web of Conferences. RSP 2017 - 26th R-S-P Seminar 2017 Theoretical Foundation of Civil Engineering. 2017. Pp. 00129.
15. Sinenko S. The method of using current regulations and standards in designing management and technologies of construction. Matec Web of Conferences. 21st Innovative Manufacturing Engineering and Energy International Conference, IManE and E 2017. 2017. Pp. 09007
